What is optical imaging?
Optical imaging has always played an important role in different ways of communication in our cultures.
In modern times with the increasing usage of electronics in various fields of daily life new challenges for applications of optical imaging have be-come obvious. In private communications simple snapshots taken by mobile phones are transmitted using quick messenger services whereas in business domains, images of various quality levels are exchanged, for instance, for analyzing, marketing or other purposes.
Of course, imaging also plays an important role in many fields of science for evaluation and the presenting of results. In industry, imaging is of high importance, for instance, for monitoring processes and metrology. Consequently issues of the present book are related to the selection and handling of scientific or technical camera systems. Besides photography, we do also include scientific and technical imaging, but not the special issues related to machine or computer vision, for instance. As for the imaging optics, we mainly restrict our consideration to lens systems in the visible spectral range. Other types of optics, like mirror optics or systems for other wavelength ranges will not be covered.
In the present introductory chapter we will outline our understanding of optical imaging and depict some basic general principles of it. We do not discuss the physical nature of light, like its description as electromagnetic waves, etc., namely topics that are well described in standard optics textbooks. We do make use of such knowledge and instead, concentrate more on the physical and technical implications for optical imaging. In the following section we will give an idea about the main topics that are covered in this book and also topics that are not discussed or only discussed on a limited scale.
Optical imaging in our understanding comprises roughly three elements (Figure 1a): The real object space with a compilation of individual objects is in general, the three-dimensional (3D) space we live in.
Images of the individual objects are located in the real image space, which in the most common case is a two-dimensional (2D) one, for instance, a photograph. The relationship between these two spaces is established by an imaging system in conjunction with the transfer method. The transfer method is based in general on using carrier waves, for instance electromagnetic, acoustical or particle waves. From a historical point of view, the first imaging systems were optical lenses for visible light (Figure 1b).
Thus, for simplicity we call the imaging system optical although in a strict sense this designation is only valid for the visible electromagnetic spectral range with wavelengths from around 390 nm up to 780nm.
In a more general situation other carrier waves, imaging systems and also imaging methods may be used. Just to name a few, acoustical waves are used for ultrasonic testing in medical and material sciences and technology, microwaves in radar imaging, and X-rays and particle beams like electrons for imaging objects of very small dimensions.
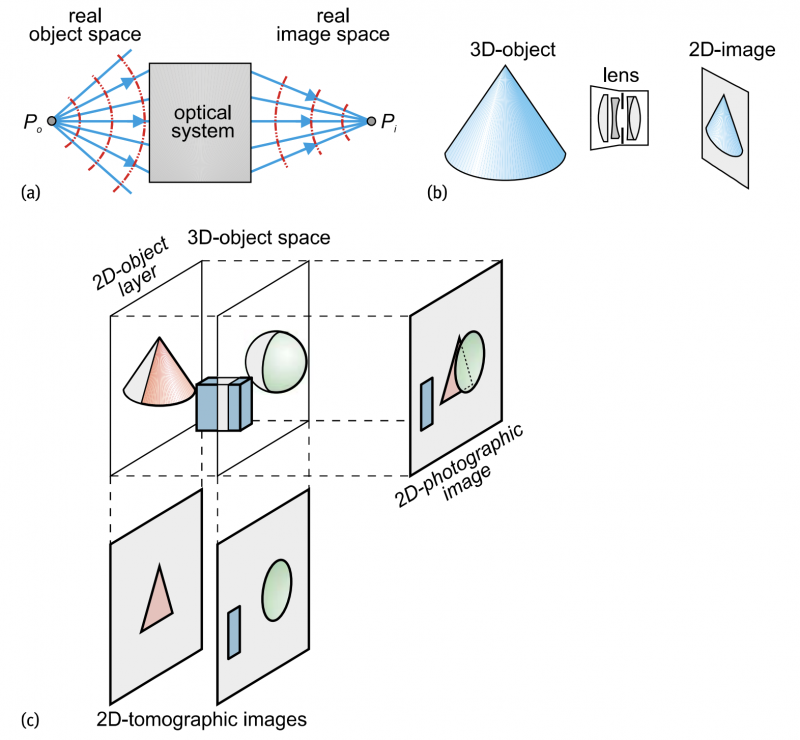
Fig.1: Optical imaging based on optical systems.(a) Schematic principle; (b) example for photography with a lens as the optical system; (c) principle of tomography yielding superposition-free images, compared to photography, yielding superimposed projected images.
As for the imaging methods we can roughly differentiate between the following ones:
Holography
In general here the complete electromagnetic field distribution of coherent waves scattered by a 3D object is stored in a hologram. This hologram is a physical 2D image of the object in a very narrow spectral range, which in the case of visible light, represents the complete 3D object structure given at any particular color. By a subsequent reproduction process the original 3D structure can be restored.
Topography
This method is used to give 3D information about a detailed surface structure of objects. Examples are geographical applications like topographic maps. More recent applications can be found in the field of microstructures that describe the surface geometry as well as its chemical respectively physical properties using data stored in a large database.
Tomography
In contrast to topography, only 2D information is given about an object layer of a 3D object (Figure 1.1c). This method delivers sectional diagrams by doing assignment be-tween a 2D object layer and a 2D image layer. The tomographic images have no information about the spatial depth perpendicular to the layer. However, through computational methods or image stacking, a 3D image can be reconstructed from the combination of individual 2D images.
Photography
This method can be described as a projection of illuminated objects in a 3D object space to a 2D image space (Figure 1 b,c). Unlike in tomography, the images of different cross sections in the object space may be superimposed. Thus in general the information about spatial depth is lost and only limited information about it is maintained. The perspective of the image depends on the properties of the photographic setup. As with other methods, spatial information can be retrieved by a combination of multiple photographic images.